 [OpenCV] 9장 에지 검출과 응용
9.1 에지 검출 9.1.1 미분과 그래디언트 에지(edge): 한쪽 방향으로 픽셀 값이 급격하게 바뀌는 부분. 즉, 어두운 영역에서 갑자기 밝아지거나, 또는 밝은 영역에서 급격하게 어두워지는 부분을 에지라고 한다. - 2차원 영상에서 에지를 찾는 기본적인 방법은 그래디언트 크기가 특정 값보다 큰 위치를 찾는 것. 에지 여부를 판단하기 위해 기준이 되는 값을 임계값(threshold) 9.1.2 마스크 기반 에지 검출 가장 널리 사용되고 있는 미분 마스크는 소벨 필터 마스크이다. void Sobel(InputArray src, OutputArray dst, int ddepth, int dx, int dy, int ksize =3, double scale = 1, double delta = 0, int b..
[OpenCV] 9장 에지 검출과 응용
9.1 에지 검출 9.1.1 미분과 그래디언트 에지(edge): 한쪽 방향으로 픽셀 값이 급격하게 바뀌는 부분. 즉, 어두운 영역에서 갑자기 밝아지거나, 또는 밝은 영역에서 급격하게 어두워지는 부분을 에지라고 한다. - 2차원 영상에서 에지를 찾는 기본적인 방법은 그래디언트 크기가 특정 값보다 큰 위치를 찾는 것. 에지 여부를 판단하기 위해 기준이 되는 값을 임계값(threshold) 9.1.2 마스크 기반 에지 검출 가장 널리 사용되고 있는 미분 마스크는 소벨 필터 마스크이다. void Sobel(InputArray src, OutputArray dst, int ddepth, int dx, int dy, int ksize =3, double scale = 1, double delta = 0, int b..
 [OpenCV] 7장 필터
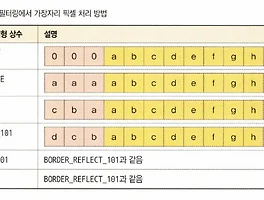
7.1 영상 필터링 7.1.1 필터링 연산 방법 필터 (filter): 무언가를 걸러 내고 일부만 통과시키는 장치 더보기 void filter2D(InputArray src, OutputArray dst, int ddepth, InputArray kernel, Point anchor = Point(-1, -1), double delta = 0, int borderType = BORDER_DEFAULT); src : 입력 영상 dst: 출력 영상, src와 같은 크기, 같은 채널 수를 갖는다 ddepth : 결과 영상의 깊이 kernel: 필터링 커널, 1채널 실수형 행렬 anchor: 고정점 좌표. Point(-1, -1)을 지정하면 커널 중심을 고정점으로 사용합니다. delta: 필터링 연산 후 추가적..
[OpenCV] 7장 필터
7.1 영상 필터링 7.1.1 필터링 연산 방법 필터 (filter): 무언가를 걸러 내고 일부만 통과시키는 장치 더보기 void filter2D(InputArray src, OutputArray dst, int ddepth, InputArray kernel, Point anchor = Point(-1, -1), double delta = 0, int borderType = BORDER_DEFAULT); src : 입력 영상 dst: 출력 영상, src와 같은 크기, 같은 채널 수를 갖는다 ddepth : 결과 영상의 깊이 kernel: 필터링 커널, 1채널 실수형 행렬 anchor: 고정점 좌표. Point(-1, -1)을 지정하면 커널 중심을 고정점으로 사용합니다. delta: 필터링 연산 후 추가적..
 [OpenCV] 6장 영상의 산술 및 논리 연산
6.1 영상의 산술 연산 영상은 일종의 2차원 행렬이기 때문에 행렬의 산술 연산(arithmetic operation)을 그대로 적용할 수 있다 = 두개의 영상을 서로 더하거나 빼는 연산으로 새로운 결과 영상을 생성할 수 있음 영상의 덧셈 연산 수식: dst(x, y) = srcl(x, y) + src2(x, y) srcl, src2: 입력 영상 dst: 결과 영상 포화 연산도 함께 수행한 덧셈 연산 수식: dst(x, y) = saturate(srcl(x, y) + src2(x, y)) void add(InputArray src1, InputArray src2, OutputArray dst, InputArray mask = noArray(), int dtype = -1); src1: 첫 번째 입력 행렬..
[OpenCV] 6장 영상의 산술 및 논리 연산
6.1 영상의 산술 연산 영상은 일종의 2차원 행렬이기 때문에 행렬의 산술 연산(arithmetic operation)을 그대로 적용할 수 있다 = 두개의 영상을 서로 더하거나 빼는 연산으로 새로운 결과 영상을 생성할 수 있음 영상의 덧셈 연산 수식: dst(x, y) = srcl(x, y) + src2(x, y) srcl, src2: 입력 영상 dst: 결과 영상 포화 연산도 함께 수행한 덧셈 연산 수식: dst(x, y) = saturate(srcl(x, y) + src2(x, y)) void add(InputArray src1, InputArray src2, OutputArray dst, InputArray mask = noArray(), int dtype = -1); src1: 첫 번째 입력 행렬..









